
braccio robotico: esecuzione di una sequenza prestabilita
In questo video vediamo il braccio robotico eseguire una sequenza prestabilita nella quale alcuni oggetti vengono spostati sul piano di appoggio.
Mentre il braccio esegue la sequenza possiamo osservare i sul monitor seriale in sovraimpressione i comandi inviati dalla scheda Arduino al servocontroller.
Il comando del braccio avviene grazie ad una scheda Arduino UNO R3 collegata ad una scheda SSC-32 per il controllo dei servomotori.
Il collegamento è semplicissimo: basta connettere:
– il pin TX di Arduino al pin RX della SSC-32
– il pin GND di Arduino all’omologo pin della SSC-32
Nel mio progetto ho utilizzato due alimentazioni separate per Arduino e per la SSC-32.
Attenzione a non scambiare questi pin in quanto potreste danneggiare le schede.
L’inizializzazione della seriale deve avvenire alla stessa velocità di ricezione della scheda SSC-32. Per impostare quest’ultima bisogna agire su un jumper posto sulla scheda stessa come indicato nel manuale.

La stringa utilizzata per il movimento dei motori segue una semplice sintassi che illustrerò con un esempio:
#0 P1500 T2000
#0 indica il motore (nel mio caso è il motore per la rotazione orizzontale)
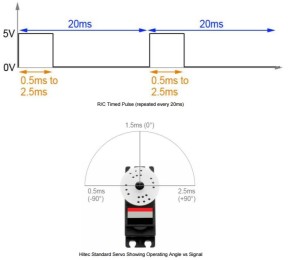
P1500 indica il periodo in millisecondi cui corrisponde la posizione del servomotore. Questo numero varia da 900 a 2100 se il servomotore ha una escursione totale di 90°, oppure tra 500 e 2500 se il servomotore ha una escursione totale di 180°. Il valore 1500 indica la posizione centrale, le altre i due gli estremi opposti (si veda l’immagine successiva tratta dai manuali Lynxmotion per un servomotore con escursione 180°).
T2000 indica il tempo totale di esecuzione del comando in millisecondi.
Informazioni tecniche e manuale della scheda SSC-32 li trovate qui (le immagine sono tratte dai manuali Lynxmotion)
http://www.lynxmotion.com/p-395-ssc-32-servo-controller.aspx
Lo sketch, ampiamente commentato e con i credits, lo potete scaricare da qui
Grazie e “buon azionamento”…
Facebook
Youtube